problem 1:
a) Derive the Transfer Function for armature controlled d.c. motor, with neat diagram and describe the benefits of armature controlled d.c. motor over field controlled d.c. motor.
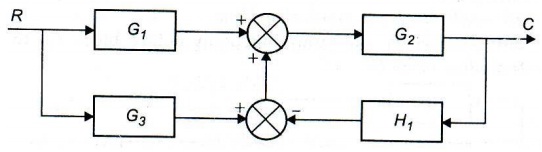
b) From the block diagram shown in figure below draw the corresponding signal flow graph and compute closed loop transfer function relating the output and input.
problem 2: The block diagram of a servo system is shown in figure below. Find out the characteristic equation of the system and therefore compute the following when the unit step input is given.
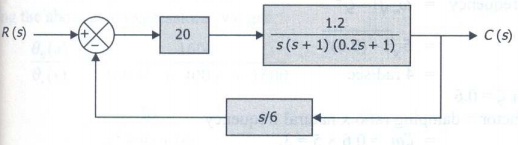
a) Un damped frequency of oscillations
b) Damped frequency of oscillations
c) Damping ratio and damping factor
d) Maximum overshoot
e) Time interval after which maximum and minimum will occur
f) Settling time
g) Number of cycles completed the output is settled within 2% and 5% of final value.
problem 3:
a) Define type and order of a control system? Describe each with an ex?
b) A unity feed-back system has G(s)=180/s(s+6) and r(t)= 4t. Find out:
i) the steady state error
ii) the value of K, to reduce the error by 6% considering k is system gain.
problem 4:
a) prepare the rules to construct the root locus.
b) Sketch the root locus plot of a unit feedback system with the open loop transfer function G(S) = K/S(S+2)(S+4).